※内容は2023年6月取材時
[研究テーマ]わずかな皮膚の伸縮や起伏を計測できる皮膚センシング技術と福祉機器の開発

モーター制御が出発点
私の専門は「制御工学」です。モーターの動きをコントロールして、ロボットアームの動きを制御する研究に取り組んできました。装着することで、重い荷物を持ち上げることができるパワードスーツの開発にもつながる基礎研究です。具体的にいえば、ロボットアームやパワードスーツで重量物を動かすと、振動が生じます。振動が大きすぎると、重量物を落としたりするなど操作に支障をきたします。その振動をプログラミングによって打ち消すのが、課題でした。振動というのは過剰な信号ですから、それを抑制していきます。単に振動を抑えると動きが鈍くなるので、加速もさせるといったような絶妙な制御理論の構築に携わってきました。
「皮膚センサー型電動義手」実用化に向けた取り組み
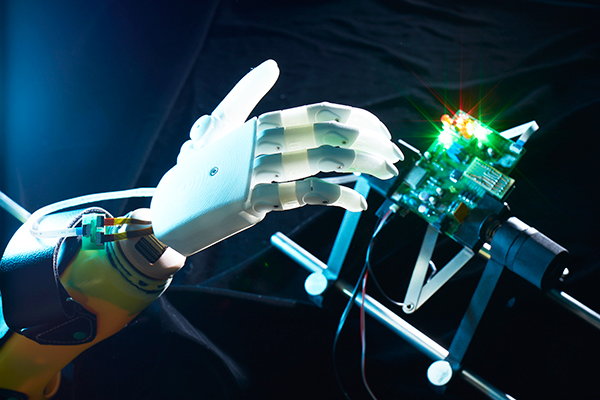
「制御工学」の取り組みを続けてきて、出会ったテーマが「皮膚センサー型電動義手」の開発です。従来の「筋電義手」から進化した義手として注目を集めています。「筋電義手」は筋肉を動かす際、脳からの命令とともに発生する微弱な電流である筋電(表面筋電位)を感知して、義手を動かす仕組み。私が開発した「皮膚センサー型電動義手」は、皮膚のわずかな動きにも反応できる点が強みです。筋肉量が少ない部位であっても、センサーを付けても動かすことができるというメリットがあります。医療機関と連携して研究を進め、実用化を目指しています。
皮膚センシング技術を応用して福祉機器の開発を目指す
現在は、企業との連携で重篤な障がいを持つ方がコミュニケーションを取るためのシステム開発に取り組んでいます。首など身体の一部を「ほんのわずかだけ」なら動かすことができる——そうした方を支援の対象とした研究開発です。ミクロレベルの皮膚の微細な動き、具体的にはいくつもの「シワ」が変化する様子をシステムが読み取り、十万倍、百万倍にも増幅させて、PC上でマウスのポインタをプログラミング制御により動かします。そうした仕組みを使い、身体の状態を示したり、50音表から文字を選んで意思を伝えるというのがシステムの全容です。大学でプログラミングを学び、「制御」技術を身につければこうした医療分野への貢献もできるのです。