
ゼロメートルゴール達成(大学院・電気情報工学専攻博士後期課程2年の秋山実穂さん)
2021年11月3日〜7日、秋田県能代市で開催された「第17回能代宇宙イベント」に情報工学科の斎藤研究室が「湘南工科大学SuperNOVAチーム」として参加。ゼロメートルゴールを達成し、UNISEC缶サット競技のランバック部門で優勝しました。
能代宇宙イベントは、主に大学生による、ロケットの打ち上げや惑星探査ローバを想定した自律ロボット制御(ローバ型CanSat)の性能を競う日本最大級のアマチュア大会として毎年開催されています。
能代宇宙イベントのランバック部門では、ドローンにCanSatを搭載して上空から落下させ、パラシュートで地上へ落下後、パラシュートを切り離してゴール地点へ向けて自律制御で走行し、最終的にどれだけゴール地点まで近づけるかを競います。
能代宇宙イベントは、主に大学生による、ロケットの打ち上げや惑星探査ローバを想定した自律ロボット制御(ローバ型CanSat)の性能を競う日本最大級のアマチュア大会として毎年開催されています。
能代宇宙イベントのランバック部門では、ドローンにCanSatを搭載して上空から落下させ、パラシュートで地上へ落下後、パラシュートを切り離してゴール地点へ向けて自律制御で走行し、最終的にどれだけゴール地点まで近づけるかを競います。

CanSatをドローンに搭載

パラシュートを切り離して走行開始

Deep Learningによりゴールを認識して走行
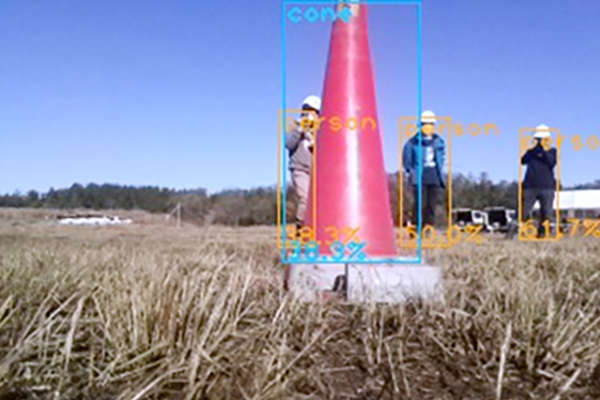
ゴール付近でDeep Learningによりゴール(水色)と人間(オレンジ)を認識
本物の宇宙開発を想定しているため、ドローンへ搭載後はCanSatに手を触れることも、無線で遠隔操縦することもできません。ゴール地点へ向けて走行中に、ぬかるみや草に引っかかったり、ひっくり返ったりするなどしても、コンピュータが自ら判断して走行不能状態から復帰し、最終的にゴール地点に十分近づいたと判断して動作を停止します。
斎藤准教授の研究室では、Deep Learningにより、ゴールをカメラ画像から認識してゼロメートルの距離まで誘導制御するローバを開発しています。今回は、従来よりもさらに高度な人工知能を実装することで、走行しながらゴールをリアルタイムで認識して、そのままゴールへ一直線に走行していくことを可能にしました。
斎藤卓也准教授のコメント
能代宇宙イベントのCanSatフィールドは毎年路面の状態が悪く、今まで能代だけは良い結果が出せていませんでした。今年も、雨上がりでぬかるんでいる上に草が茂っていて凸凹が激しいため、走行は困難な状況でした。しかし、物体認識可能な最先端の人工知能を実装することで、ゴールのみならず人間や気球などさまざまな物体を認識しながら確実にゴールへ向けて走行し、ゼロメートルゴールを達成することができました。
能代宇宙イベント
斎藤准教授の研究室では、Deep Learningにより、ゴールをカメラ画像から認識してゼロメートルの距離まで誘導制御するローバを開発しています。今回は、従来よりもさらに高度な人工知能を実装することで、走行しながらゴールをリアルタイムで認識して、そのままゴールへ一直線に走行していくことを可能にしました。
斎藤卓也准教授のコメント
能代宇宙イベントのCanSatフィールドは毎年路面の状態が悪く、今まで能代だけは良い結果が出せていませんでした。今年も、雨上がりでぬかるんでいる上に草が茂っていて凸凹が激しいため、走行は困難な状況でした。しかし、物体認識可能な最先端の人工知能を実装することで、ゴールのみならず人間や気球などさまざまな物体を認識しながら確実にゴールへ向けて走行し、ゼロメートルゴールを達成することができました。
能代宇宙イベント

